While waiting for the parts to my very own reprap machine, I figured I would experiment a little with some possible head designs. One I am particularly interested in is something like a ‘pick and place’ machine that can manipulate objects in 3 dimensions. My simple design involves a drinking straw, a couple $3 hobby servos, a bunch of hand molded shapelock, and a few hot glue burns.
Here is the final result:
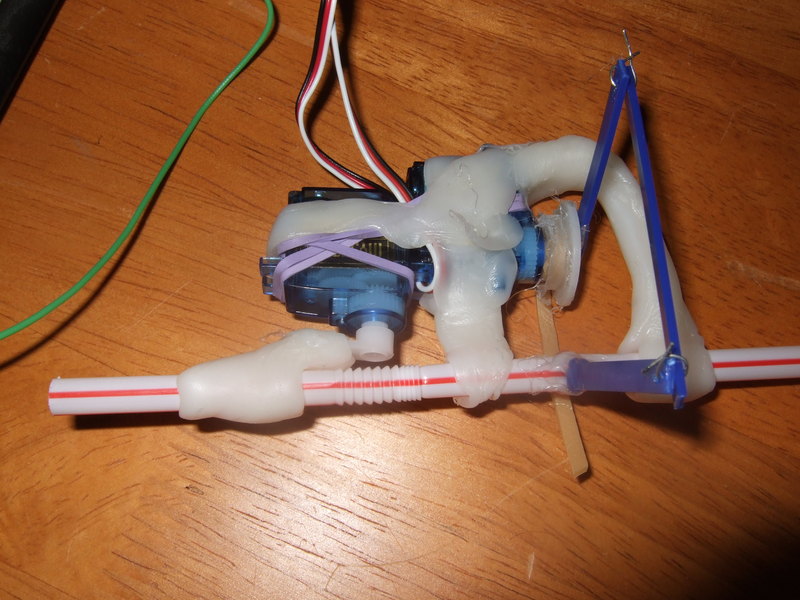
The basic idea is the bottom servo (bottom is to the left) can bend the straw left and right, and the other servo can rotate the straw in place. the bend in the straw acts as a universal joint so the object held can be rotated somewhat arbitrarily in 3 dimensions.
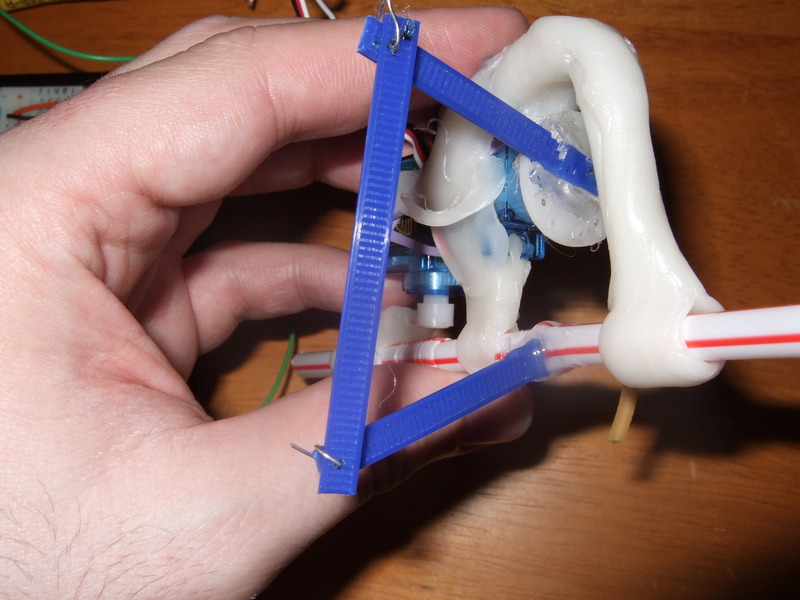
A simple linkage connects the top servo to the straw. I attempted a couple different things, starting with a pully system, then a gear system. neither worked out too well. The linkage turned out to be quite simple and robust.
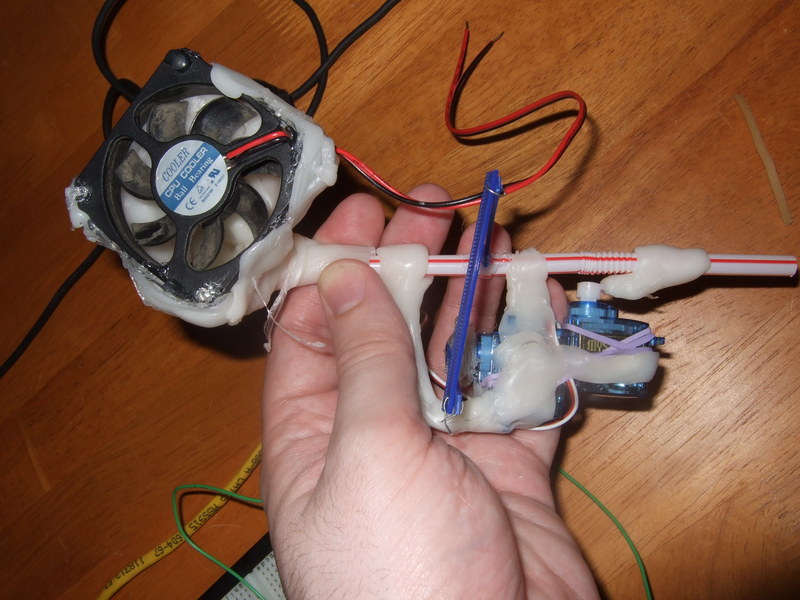
Here it is with the attached fan I attempted to use as a vaccum pump. It did not turn out too well, the fan was scavanged from an old CPU and was never meant to be used like this, so I will need an actual vaccum pump at some point.
Everything was controlled for testing with a Wii nunchuck and an arduino microcontroller with custom code. Here is a video of it in action:
So, some stuff I learned
- ShapeLock is wonderful stuff. I was able to form and reform the head a few times, even fairly large changes like making room for a gear involved reheating a part of the project and shaping it by hand. And I can just melt it down again and reuse it for my next prototype.
- The linkage is the way to go. I struggled a long time with gears and pullys. I imagine that if I were precision machining things and could get gears/pullys in the exact right size, things would have been different. But when it comes to the fuzzy world of hand-squished shapelock, the more forgiving linkage worked out great.
- I am gonna stock up on these tiny and cheap servos. They have a very interesting and useful bug. if you try to overextend them, they go into continuously rotating mode with no modification! So you can have the same servo work as a continously rotating one at some points, but also have precise precisioning at others.
- The Wii nunchuck is a great little thing. it took a few dozen lines of arduino code to interface with it and I got a joystick, 3 buttons, and a 3 axis accelerometer.

Comments 1
neat build. what servos were you using?
Posted 29 Sep 2011 at 1:58 pm ¶Trackbacks & Pingbacks 5
[…] Prototype Pick and Place Head by John […]
[…] Prototype Pick and Place Head by John […]
[…] Prototype Pick and Place Head by John […]
[…] Prototype Pick and Place Head by John […]
[…] Prototype Pick and Place Head by John […]